
Background
During my first year at VCU, I was a member of the Mechanical Team with Hyperlabs, an engineering student organiation designed around competing in the Intelligent Ground Vehicles Competition (IGVC). We designed a vehicle capable of navigating a complex obstacle course without any human input, simulating real-world situations a self-driving vehicle may encounter.
In February 2026, I became the Electromechanical team lead for Hyperlabs. With the vehicle designed, the team is seeking to redesign the drivetrain to support a mecanum wheel configuration. The vehicle currently uses 2WD, meaning significant design work has been done to permit this retrofit.
Planning and Preparation Phase
When I first joined Hyperlabs, the Mechanical Team consisted of only three members; myself, and the existing two team captains. This close-knit team format allowed me to take a much more direct role in the design process than I otherwise would have been able to, since I was able to easily access the executives and communicate to them what needs to be accomplished.
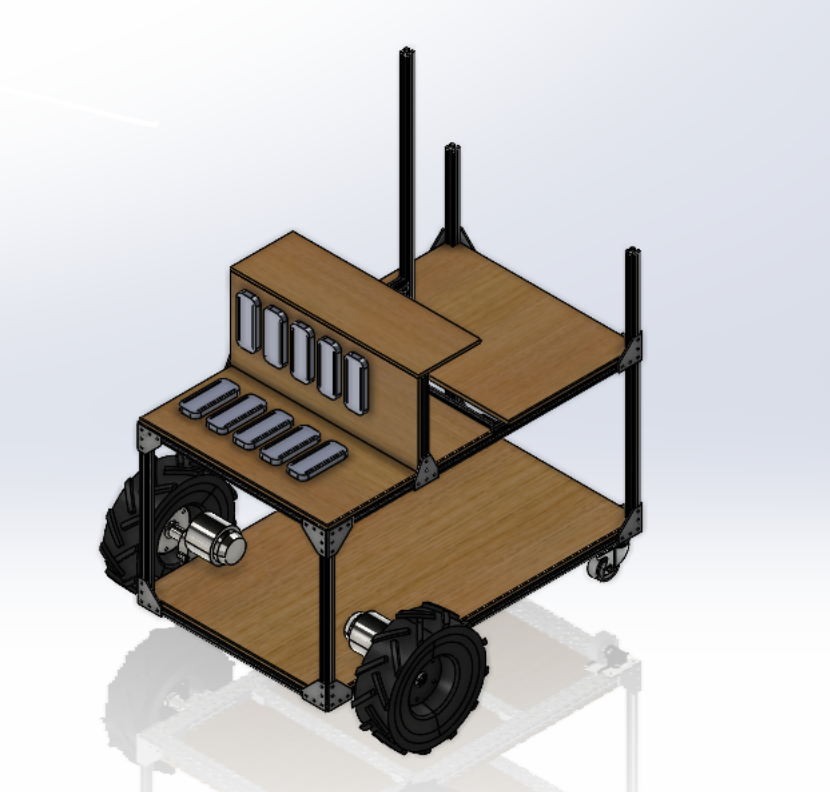
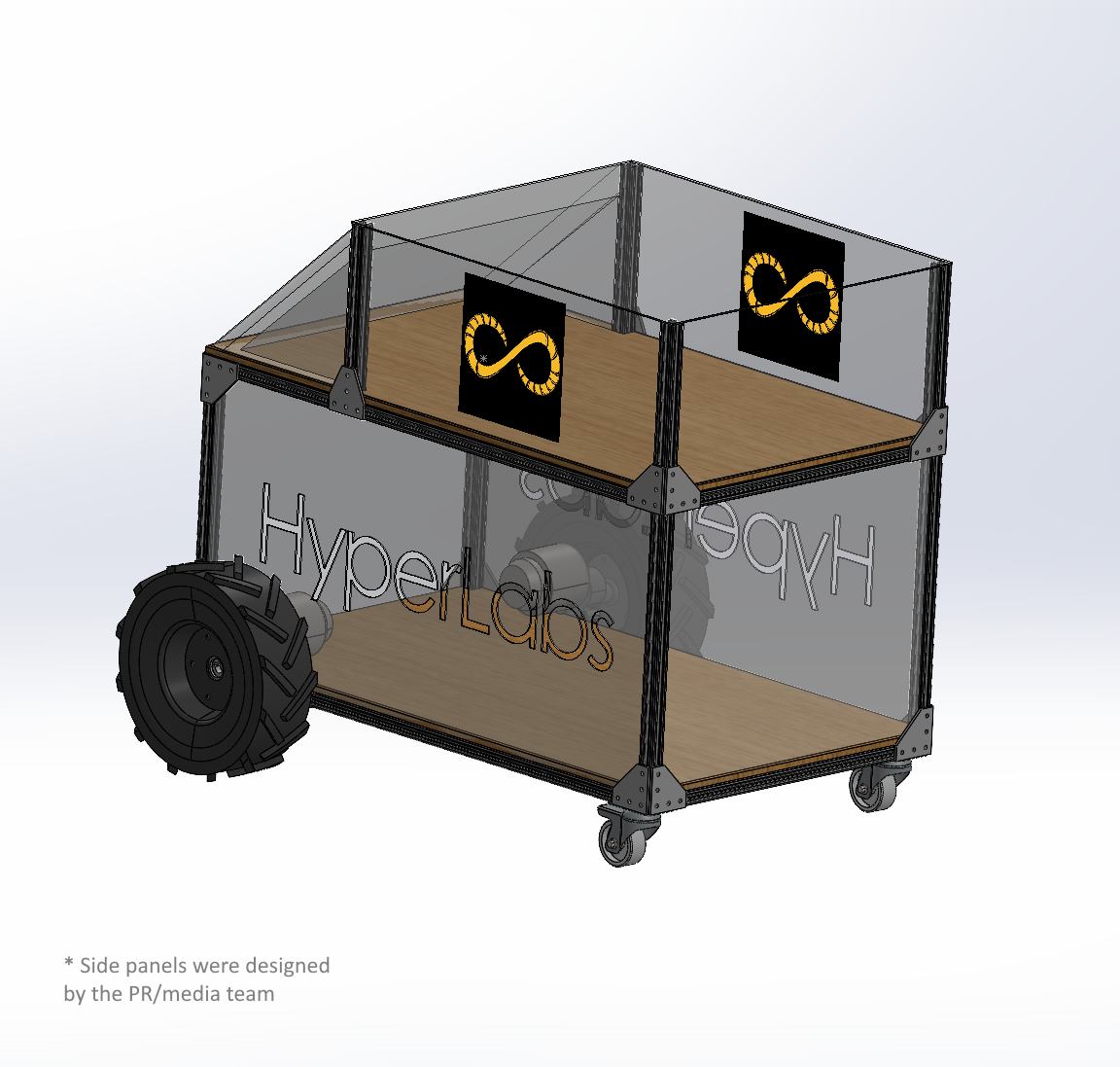
My first major contribution to the project came when we designed the chassis for the vehicle, which was named IMPRIMUS early-on, meaning "the first of its kind". I designed the entire exterior vehicle using SolidWorks, utilizing aluminum extrusion for the structural elements and machined wooden panels to protect the internal electronics. This design was also chosen specifically to fit within the design footprint for the competition and ensure a stable center-of-mass for the vehicle so that it would not overturn.
This model provided a reference for the Sensors and Computing teams to implement into their work, and also allowed our team to generate a bill of materials for the initial frame assembly. We were able to submit this generated cost analysis as justification for increased SGA funding, which allowed us to move forward on the project extremely quickly.
Chassis Assembly
The use of aluminum extrusion made our design extremely easy to construct in our university Makerspace. We utilized drop-in inserts that allowed for quick assembly and easy resolution of mistakes. We worked over the course of a week to complete the frame assembly, then began working on the wood panels. These panels were sourced from a local hardware store then cut down to size using a mitre saw. From there, we shaped the panels using a router and jigsaw where necessary, before sanding the pieces smooth.
These panels were meant to protect the internals of the machine while being easily removable, allowing us to work on the internals of the vehicle without issue. We also tested the weight of our components, including the power supply and on-board computer, to ensure the vehicle would be stable with this added weight.
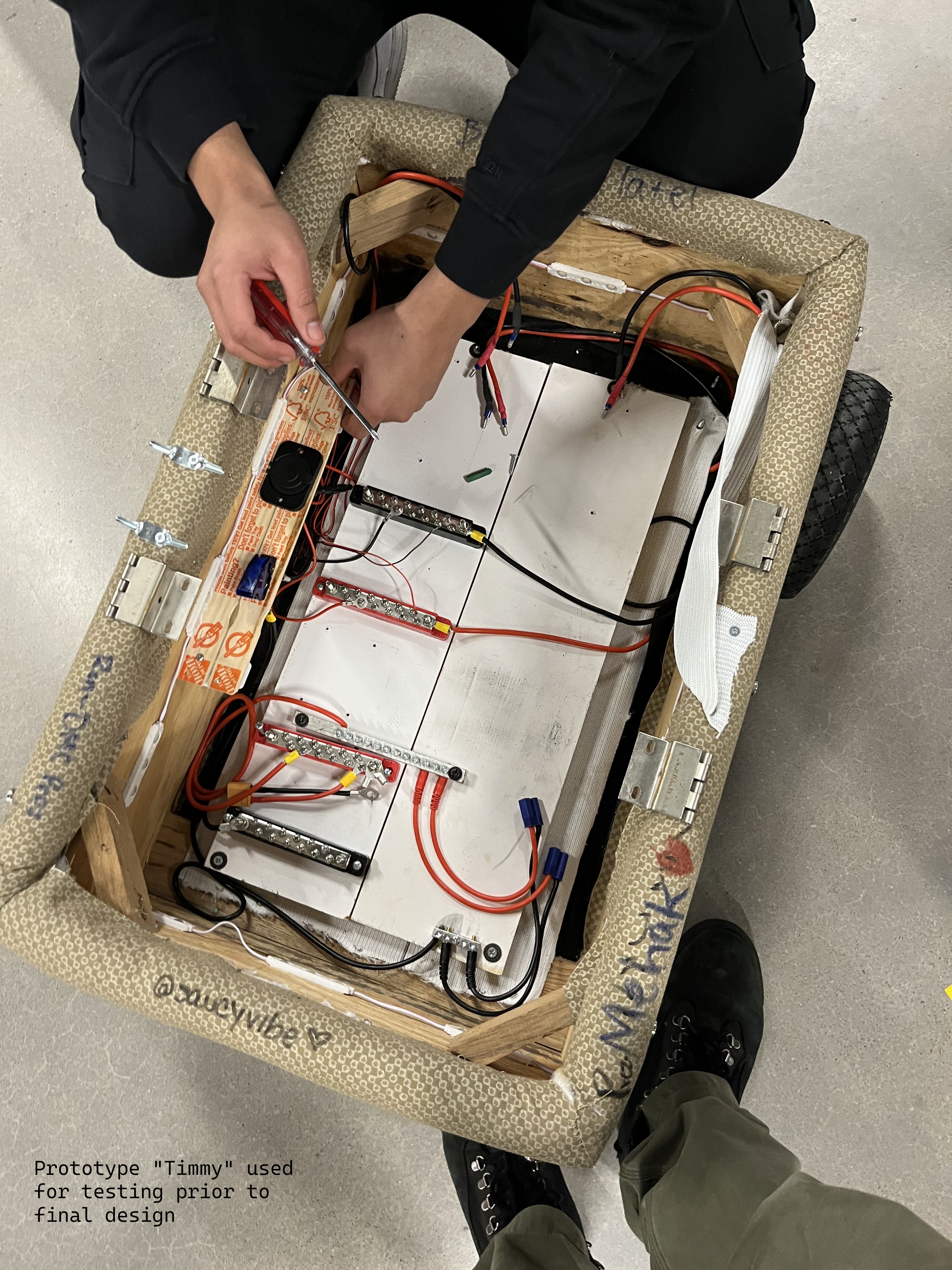
Incorporating Sub-teams
While our team was busy putting together the robot, the Sensor and Computing teams were implementing our design into their autonomous simulation software. We also worked with the Power Systems subteam to connect the power supply and UPS. Our team designed a motor mount for a wheelchair motor, then 3D printed a prototype to ensure our dimensions were correct. Following this, we submitted a work-order to our Makerspace to have the mount machined from aluminum, providing structural stability and reliability for such a heavy component. Finally, after including the wheels and implementing remote control, we had a working vehicle that we could then convert to autonomous.
I also learned a considerable amount working with ROS in workshops and learning from the computing team. I have previous experience in designing mechanical systems for Gazebo simulation through my work on RISE, but working with Hyperlabs has given me an opportunity to interact directly with programming robotics using both Python and C++ in ROS.
Sensor Mounts
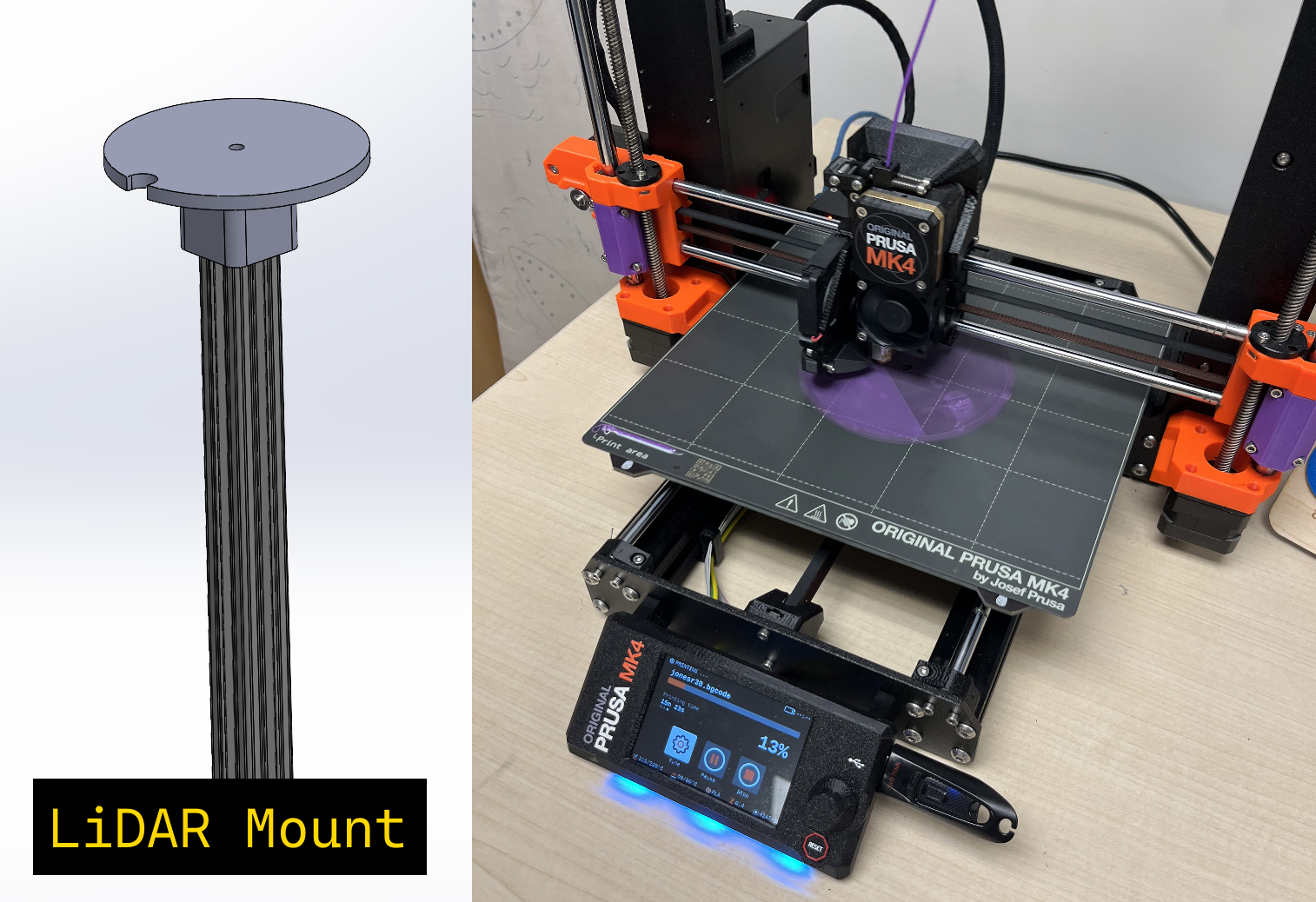
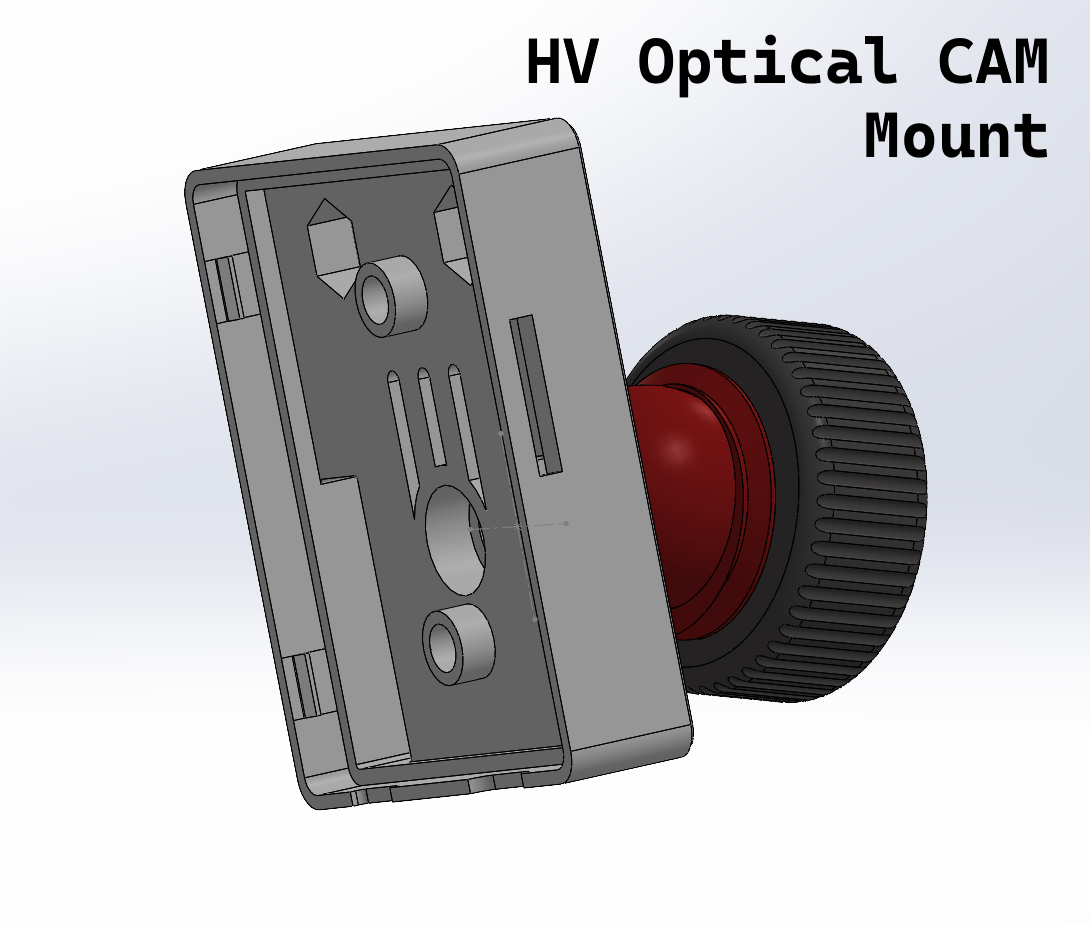
Even after the physical vehicle had been constructed based on our design, we still needed to integrate the necessary sensors to provide enough data for the autonomous model to succeed. These included several cameras, both optical and depth-sensing, LiDAR, encoders for wheel motion, a kill-switch feature, and much more. I designed several adjustable mounts for these components that were designed to slot into aluminum extrusions using the same drop-in tabs we used for the frame assembly. Some of these designs are pictured above.
Capstone Design Expo 2024
I traveled with other members of Hyperlabs to present our work at VCU's Capstone Design Expo for Fall 2024. This expo is intended for senior design projects and graduate research teams, however our organization was encouraged to submit our work by a number of professors in the College of Engineering. While we didn't make it to IGVC 2024, we still had an impressive prototype that exhibited powerful self-navigation abilities, and we spoke to several employers and research teams who were impressed with our progress in just under a year. Ultimately, the Capstone Expo was a fantastic experiene and I tremendously enjoyed the opportunity to see what other students were working on, as well as present my own work.

Conclusions

Overall I was extremely happy with how this project turned out, and we were successful in developing an autonomous vehicle capable of navigating its environment by observing its surroundings. I was able to get a vast array of hands-on experience from this project as well, giving me insight into everything from submitting procurement requests, high voltage safety considerations, cost and design analysis, public speaking and presenting, and applying engineering principles to solving tangible problems. I had a fantastic time working with Hyperlabs and meaningfully connected with many of my team members, and I'm extremely grateful to have had the opportunity to work on such an innovative and interesting project.
Serving as the Electromechanical Team Lead has taught me a lot about task delegation and planning long term technical projects, and working with the rest of the executive and electromechanical teams to bring this project to life. I've learned a lot about programming autonomous vehicles and integrating mechanical systems with software control into my designs, and I'm excited to take this project to the competition!
