Project Overview
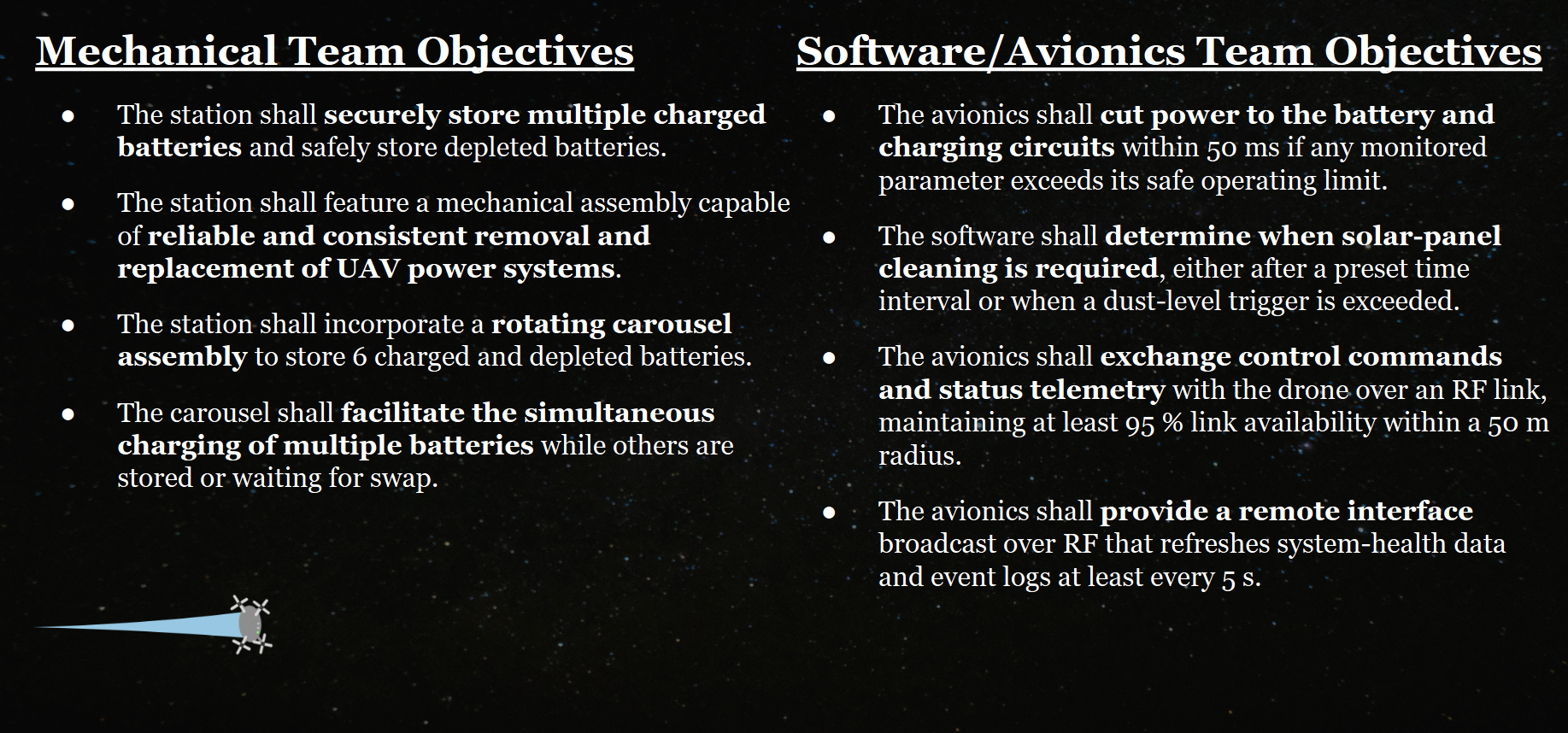
I am the project lead for RISE (Rechargeable Infrastucture for Martian Surface Exploration), working with a professional aerospace engineer to direct 9 students in designing, programming, and prototyping a drone base station that will allow for autonomous battery swapping for drones and automatic navigation using a waypoint communication system. Read more at https://katerib.github.io/RISE/pages/team.html.
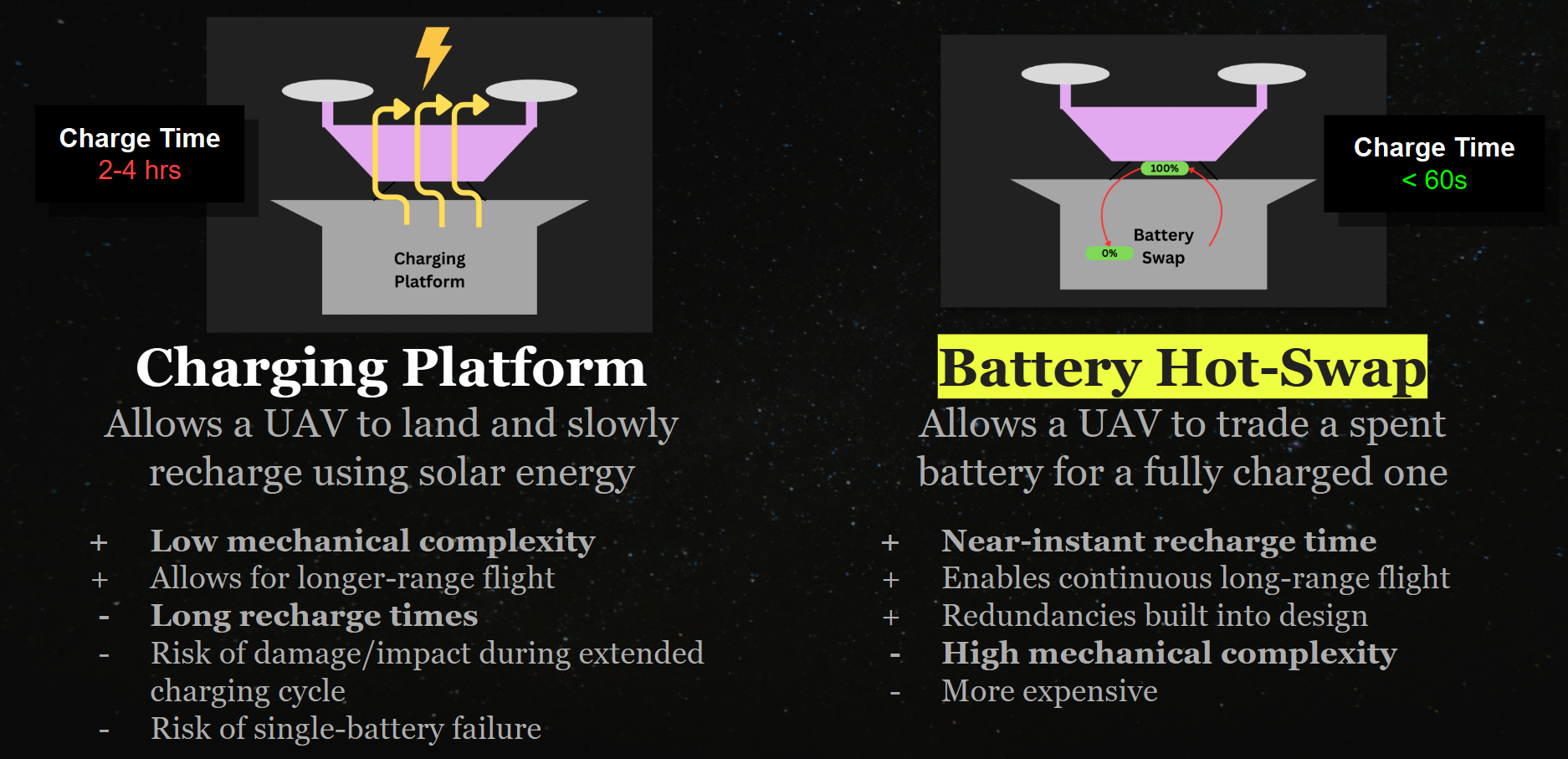
The mission of RISE is to create reliable, autonomous energy infrastructure that keeps Mars exploration drones operational during long-range flight in harsh extraterrestrial environments. Our charging stations will serve as critical infrastructure for sustained surface missions, enabling extended exploration that expands humanity's presence on Mars. These stations will perform autonomous mechanical exchange of the installed battery cartridge from the UAV, replacing a spent battery with a fully charged one.
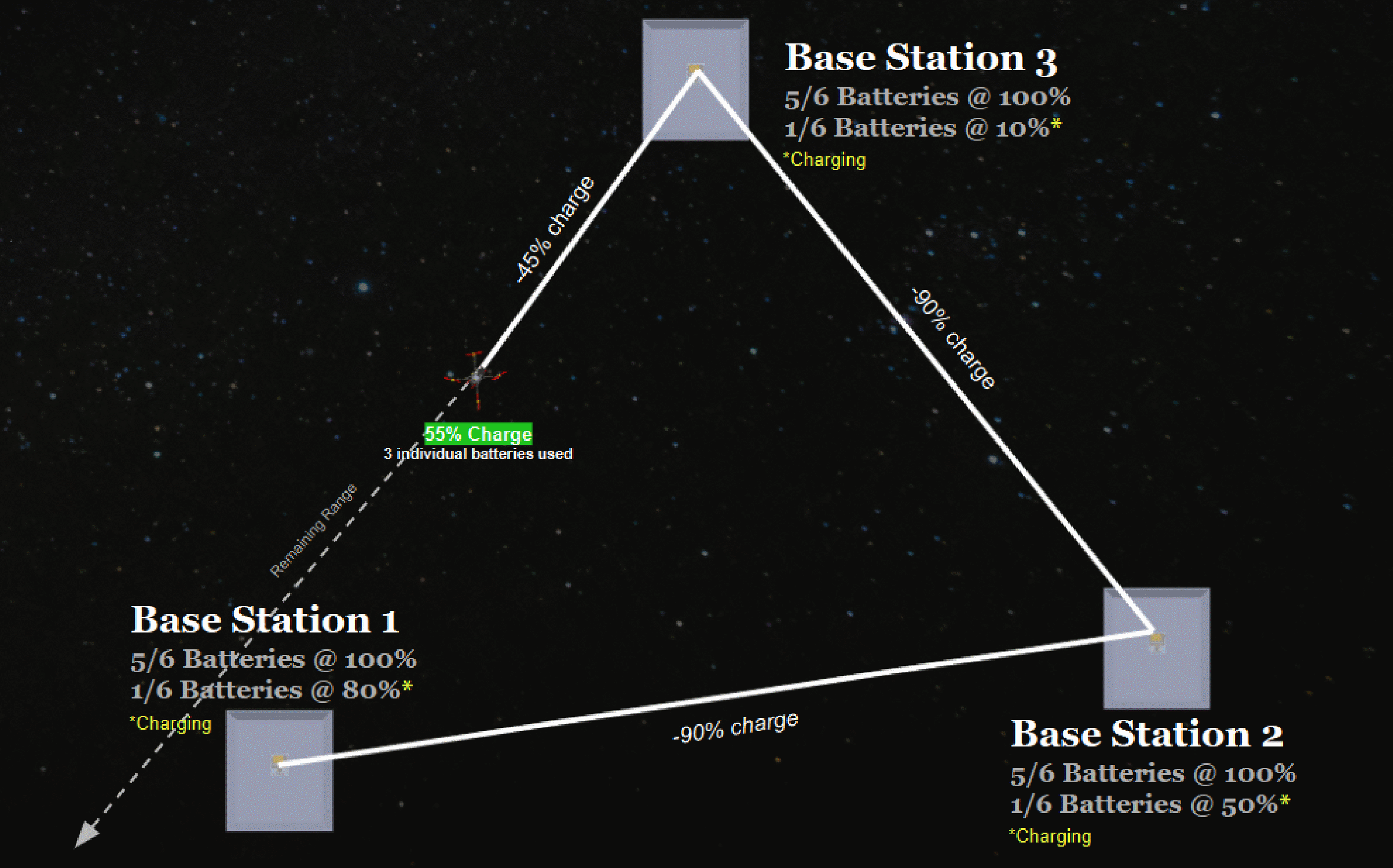
UAV exploration of the martian surface offers a safe and reliable way to map terrain and transport resources, samples, and data for future settlements without requiring human transport. It reduces human risk, but is limited by UAV power systems range. Existing battery solutions do not have sufficient storage capacity for long-range missions. Our solution: Rest-stops, or “waypoints” along the way which can recharge the drone’s power systems
Our solution will align to ASME standards and fit mission criteria for NASA systems.
We plan to finish a detailed design of our station and complete the autonomous controls before handing over the design to a remote manufacturing team, funded by grants we are currently pursuing.
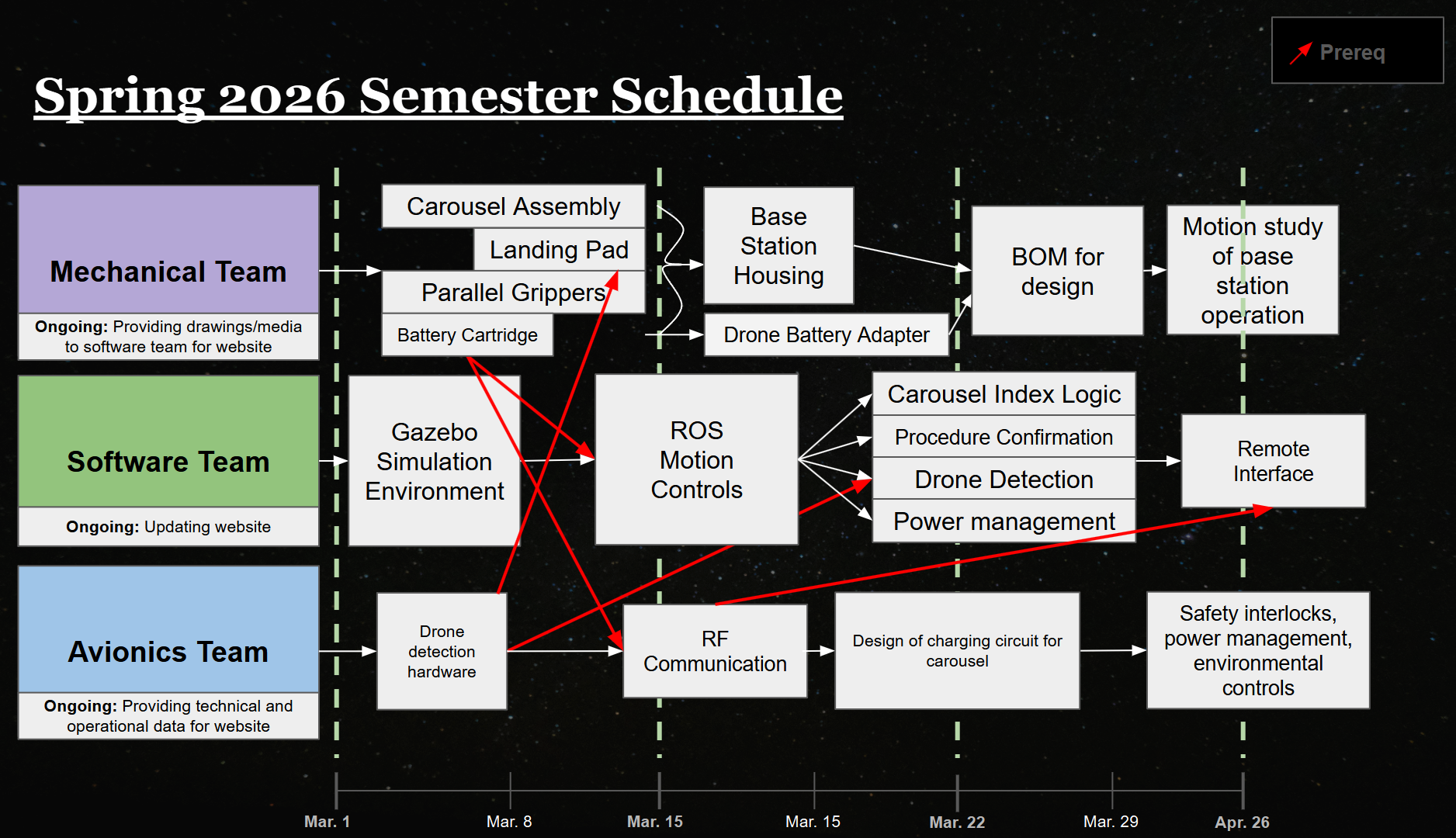
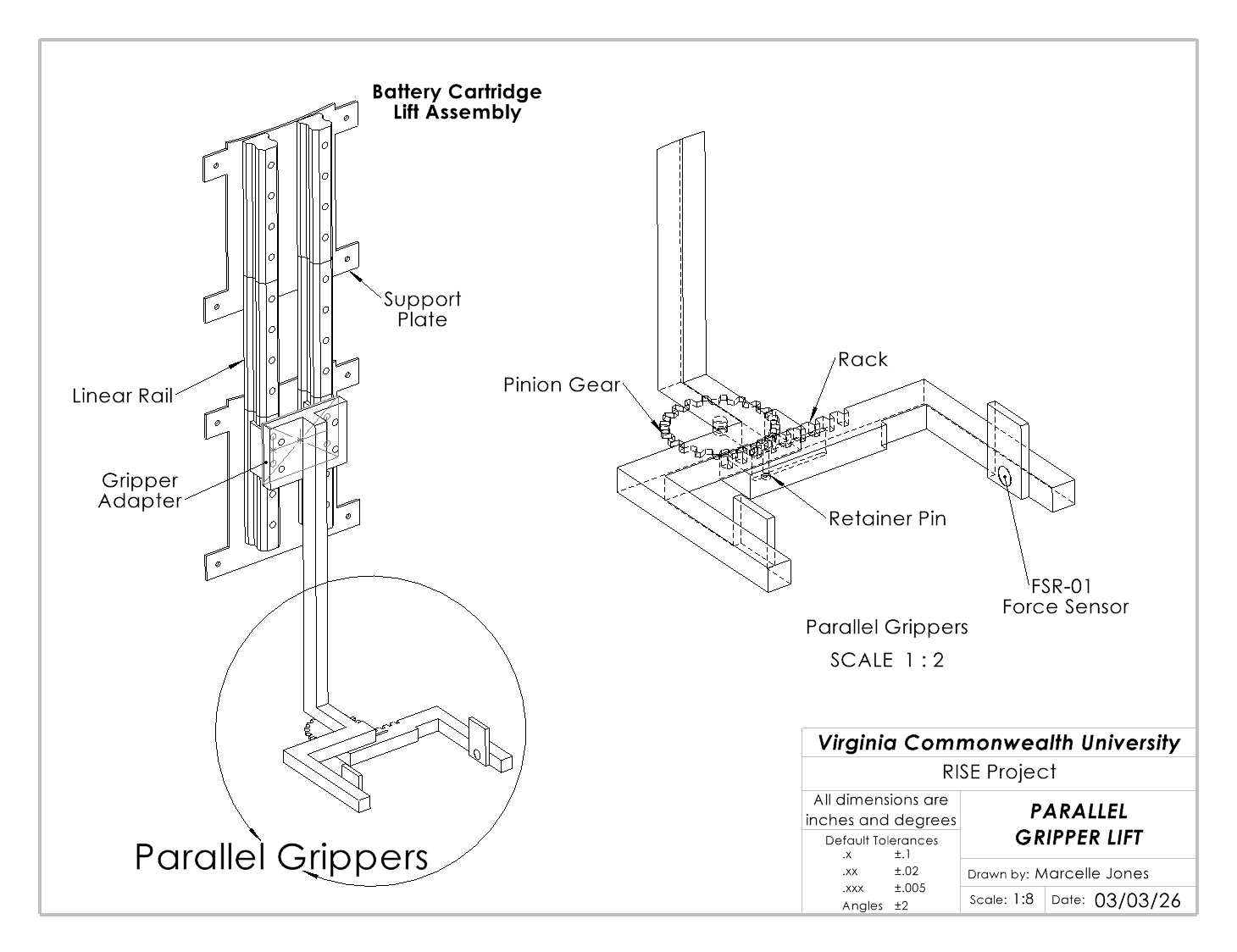
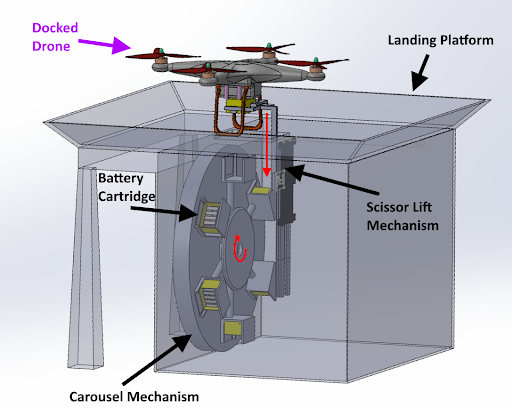
When a drone lands on the base station, it is detected and the exchange procedure is started. A hatch in the landing pad opens to allow a parallel gripper assembly to detach and transport the battery cartridge from the drone to the base station. A rotary carousel containing five fully charged batteries contains the empty battery cartridge from the drone, then rotates to present a charged battery to the parallel grippers. The grippers then return the charged battery to the UAV, quickly providing a full recharge of the drone. The stored depleted battery is then charged using solar power to prepare for another drone, while the other four charged batteries provide a buffer for multiple successive station uses.
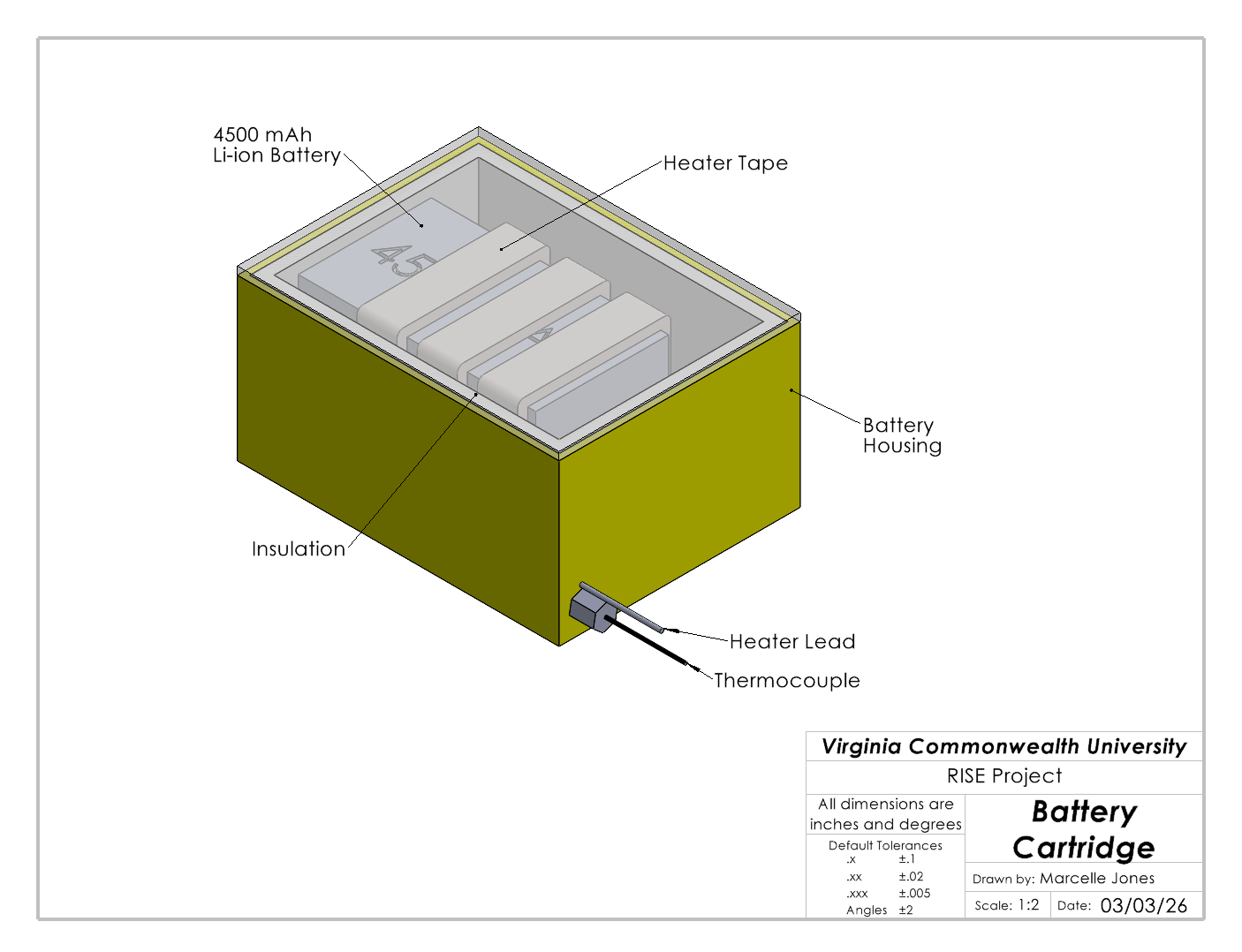
I have developed a number of mechanical designs for the base station in assisting the mechanical team with their work. I constructed a parallel gripper assembly capable of securely transporting a battery between the drone frame and the base station carousel. I also created a battery cartridge design implementing temperature controls and monitoring to preserve the environmental health of the battery.